設備統合制御・統合開発環境を実現するロボットコントローラです。お客様一人ひとりに最適なロボットシステムを提供します。
対応ロボット|
RC9M:VMB-2515/2518
RC9L:VLA-4025/6022
CRC9:COBOTTA PRO 900/1300
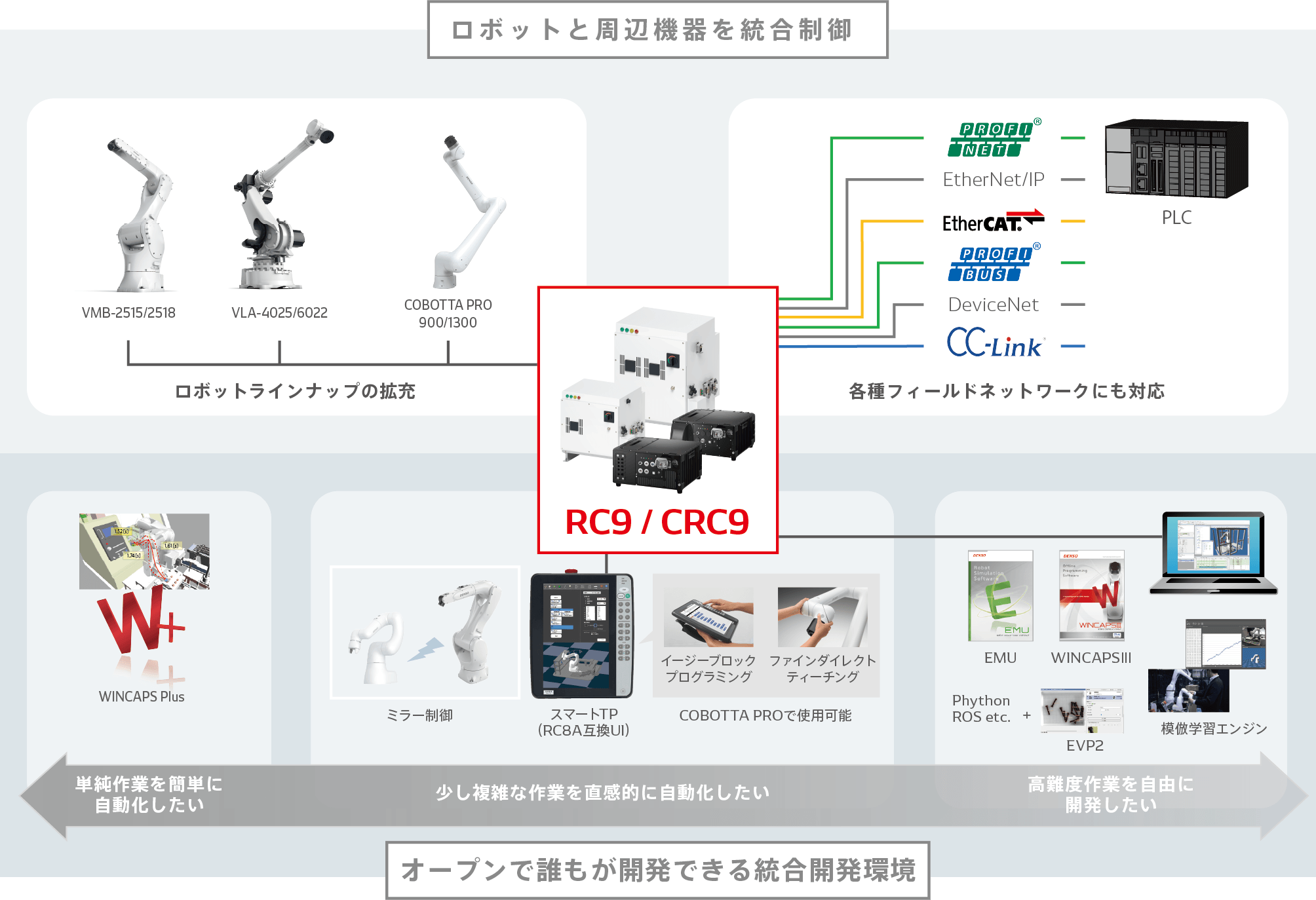
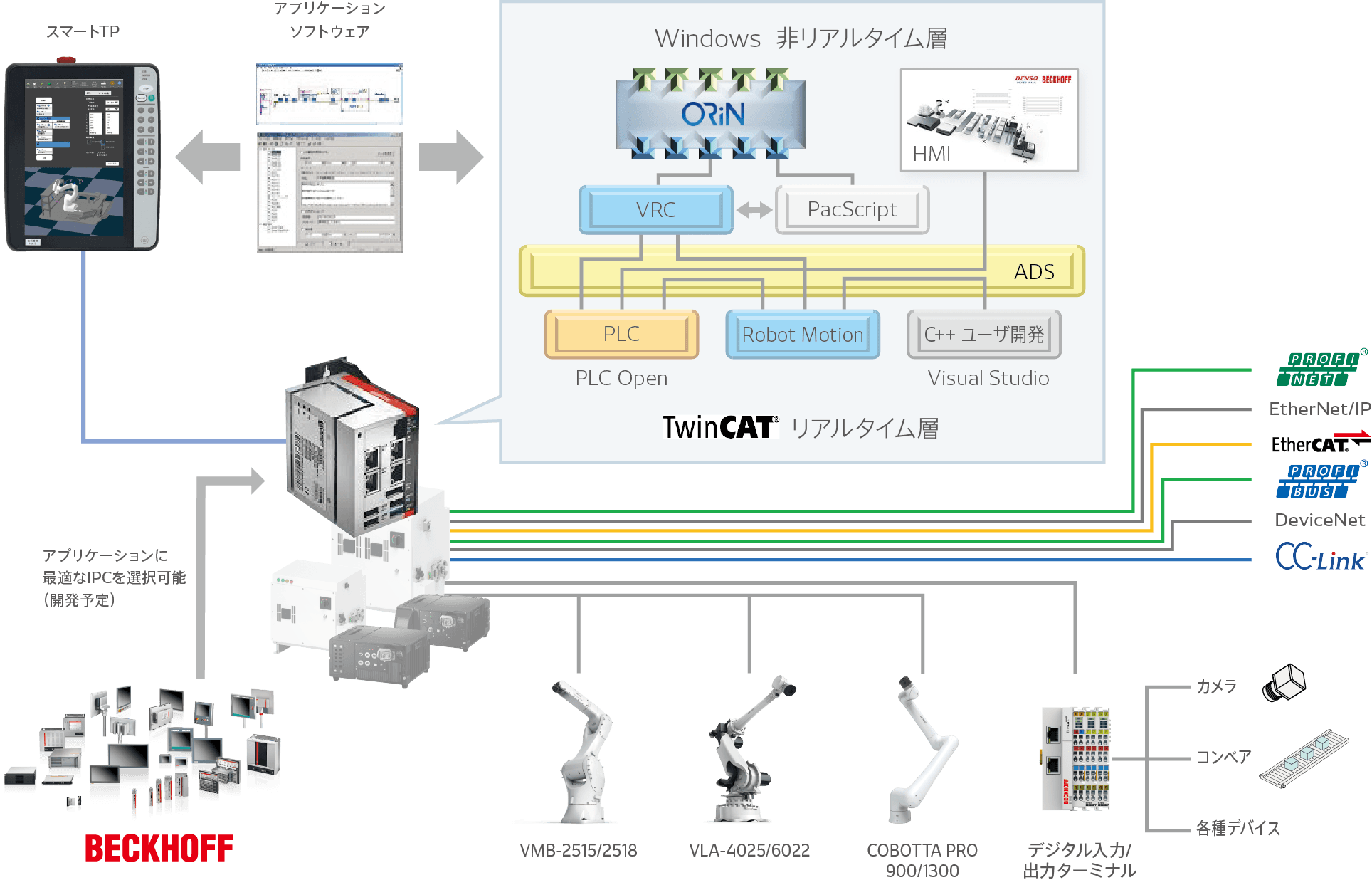
①シンプルな設備統合制御
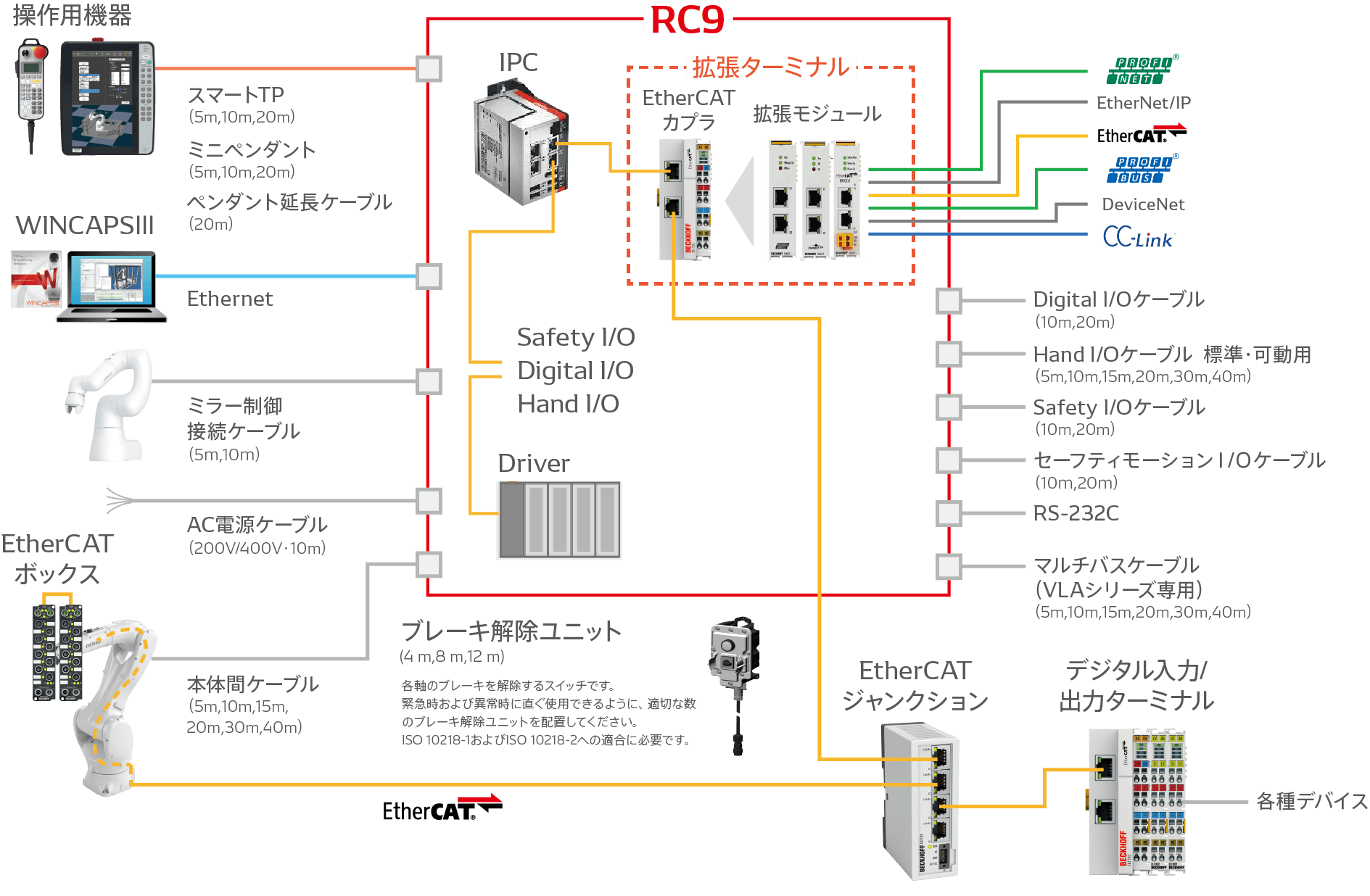
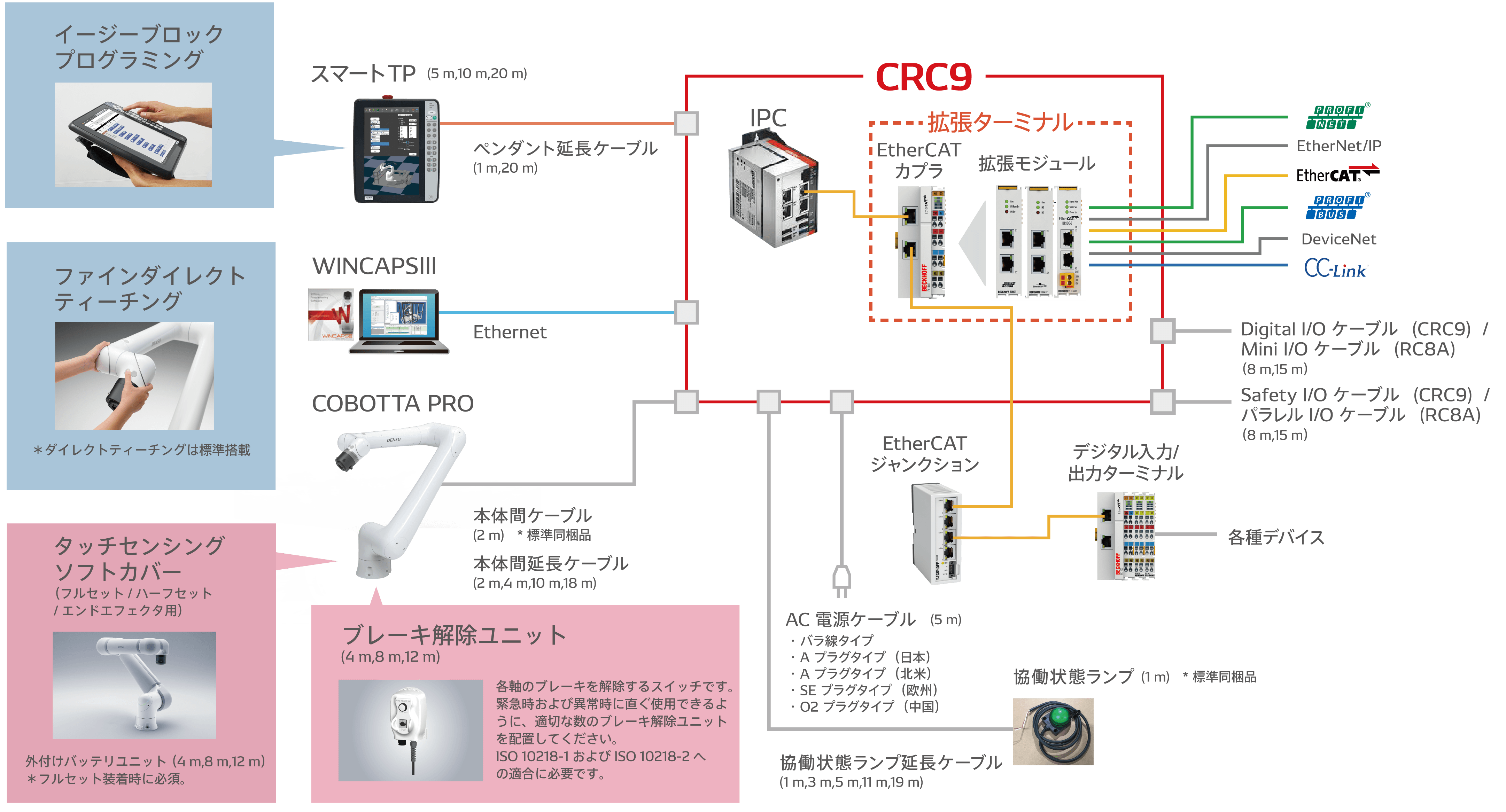
RC9/CRC9は、お客様が自動化を実現したいアプリケーションにあわせてIPCを選択することができます。また、RC9ではPLC Openを活用可能で、RC9を中心とした設備構築が可能です。ソフトウェアやビジョンなどの周辺機器を含め、シンプルな設備統合制御を実現します。
②オープンな開発環境
RC9はリアルタイム層、非リアルタイム層にかかわらずソフトウェアやアプリケーションを実装可能です。従来のようにメーカーだけでなく、ユーザーやシステムインテグレーターも開発できるオープンな開発環境を提供します。(※CRC9は開発中)
| 型式 | RC9M | RC9L | CRC9 | |
|---|---|---|---|---|
| 適用ロボット | VMB-2515/2518 | VLA-4025/6022 | COBOTTA PRO 900 / COBOTTA PRO 1300 | |
 |
 |
 |
||
| 電源 | 電源容量 | 4.5kVA | 10.0kVA | 1.0kVA |
| 入力電圧範囲 | 3相 AC200V-10%~AC230V+10% | 3相 AC400V-10%~AC480V+10% | 単相 AC200V-15%~AC240V+10% 単相 AC100V-15%~AC120V+10% |
|
| 電源周波数 | 47~63Hz | |||
| AC電源ケーブル | 10m | 5m 下記より選択します。 ・バラ線タイプ ・Aプラグタイプ (日本) ・Aプラグタイプ (北米) ・SEプラグタイプ (欧州) ・O2プラグタイプ (中国) |
||
| 制御軸数 | 6 | |||
| 制御方式 | PTP、CP3次元直線、3次元円弧 | |||
| 使用言語 | PacScript(デンソーロボット言語) | PacScript(デンソーロボット言語)、イージーブロックプログラミング(オプション) | ||
| 教示方式 | 1)リモートティーチング 2)数値入力(MDI) | 1)リモートティーチング 2)数値入力 3)ダイレクトティーチング 4)ファインダイレクトティーチング(オプション) |
||
| 外部信号 | Digital I/O | 専用入力:8点 / 専用出力:8点 汎用入力:8点 / 汎用出力:8点 |
専用入力:8点 / 専用出力:9 or 10点 汎用入力:8点 / 汎用出力:7 or 8点 |
|
| Hand I/O | 汎用入力:12点 / 汎用出力:12点 | 汎用入力:6点 / 汎用出力:6点(本体間ケーブルに含む) | ― | |
| Safety I/O | 専用入力:6点 / 専用出力:8点 | 汎用安全入力:16点 汎用安全出力:16点 外部⾮常停⽌⼊⼒ : 2点 ⾃動イネーブル⼊⼒ : 2点 防護停⽌⼊⼒ : 2点 イネーブルSW出⼒ : 2点 ペンダント⾮常停⽌出⼒ : 2点 STOモニタ出⼒ : 2点 |
||
| 外部通信 | Ethernet | ロボットコントローラ側面:1回線(GbE:Gigabit Ethernet) | ロボットコントローラ前面:2回線(GbE:Gigabit Ethernet)(1回線はセーフテイパラメータ送信専用) | |
| EtherCAT | - | ロボットコントローラ前面:1回線 | ||
| USB | ロボットコントローラ側面:1回線、ロボットコントローラ内部(ロボット制御IPC):3回線 | ロボットコントローラ前⾯ : 1回線 ロボットコントローラ内部 (ロボット制御IPC) : 2回線 |
||
| オプション拡張 | 3ユニット(I/Oターミナルは2つで1ユニット換算) | |||
| 自己診断機能 | オーバーラン・サーボ異常・メモリ異常・入力ミス、短絡検知(I/O配線部)など | |||
| エラー表示 | 外部エラー出力 | |||
| ミニペンダント(オプション)にエラーコード表示 | スマートTP(オプション)にエラーメッセージ、復帰方法を表示 | |||
| ティーチングペンダント(オプション)にエラーメッセージ、復帰方法を表示 | ||||
| 環境条件(動作時) | 温度0~40℃、湿度20~90%RH(結露不可) | 温度0~50℃、湿度20~90%RH(結露不可) | ||
| I/O電源 | 外部電源を使用 | 外部からDC24V±10%を供給 | ||
| 内部電源を使用 | コントローラ内部からDC24V±10%を供給 | |||
| 安全性能(安全機能) | PL d, Cat. 3 | |||
| 過電圧カテゴリ(IEC 60664-1) | Ⅲ | II | ||
| 感電保護クラス | I | - | ||
| 保護等級 | IP54 | IP20, IP54 | ||
| 汚損度(IEC 60664-1) | 3 | - IP20タイプ : 2*¹ - IP54タイプ : 3 |
||
| 質量(トランスの質量は含まず) | 約93kg | 約104kg | - IP20タイプ : 約15kg - IP54タイプ : 約18kg |
|
| 外形寸法 | 600(W)×582(L)×690(H)mm | 600(W)×582(L)×840(H)mm | IP20:420(W)×360(D)×200(H) IP54:420(W)×461(D)×200(H) ネジ部含む、ゴム足除く |
|
| 適合規格 | ISO 10218-1:2011, ISO 13849-1:2015, IEC 60204-1:2016/A1:2021, EN 61000-6-2:2005, EN 61000-6-4:2007/A1:2011, EN 61000-6-7:2015 |
ISO 12100:2010, ISO 10218-1:2011, ISO 13849-1:2015, IEC 60204-1:2016/A1:2021, ISO/TS 15066:2016, ISO 13850:2015, IEC 61508-1:2010 series, IEC 61800-5-1:2022, IEC 61800-5-2:2016, EN 61000-6-2:2005, EN 61000-6-4:2007/A1:2011, EN 61000-6-7:2015, IEC 63000:2018, ANSI/RIA R15.06-2012, CAN/CSA-Z434-14 |
||
| EtherCATケーブル | RJ45-RJ45, 固定用:0.5, 2, 5, 10, 20, 40m | ||
| RJ45-RJ45, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCATボックス用ケーブル | 電源ケーブル | M8-Open, 可動用:2, 10, 40m | |
| M8-M8, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| 7/8"-Open, 耐屈曲用:2, 10, 40m | |||
| 7/8"-7/8", 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCATケーブル | M8-RJ45, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | ||
| M8-M8, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| IO-Link用センサケーブル | M12-Open, Class A, 可動用:2, 10, 40m | ||
| M12-M12, Class A, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| M12-Open, Class B, 耐屈曲用:2, 10, 40m | |||
| M12-M12, Class B, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| DIO用センサケーブル | M8-Open, 可動用:2, 10, 40m | ||
| 拡張機能 (USBドングル・ライセンス) |
TwinCAT3 PLC | ||
| TwinCAT3 PLC + HMI Web | |||
| 電源 | 電源トランス(VMB)(組付) | ||
| 電源トランス(VLA)(組付) | |||
| フィールドネットワーク | EtherCATジャンクション | 3ポート, 4ポート, 8ポート | |
| EtherCATブリッジ ターミナル | |||
| PROFINET RTコントローラ ターミナル | |||
| PROFINET RTデバイス ターミナル | |||
| EtherNet/IPマスタ ターミナル | |||
| EtherNet/IPスレーブ ターミナル | |||
| PROFIBUSマスタ ターミナル | |||
| PROFIBUSスレーブ ターミナル | |||
| DeviceNetマスタ ターミナル | |||
| DeviceNetスレーブ ターミナル | |||
| CC-Linkスレーブ ターミナル | |||
| シリアル通信 | RS232C 2ch ターミナル | ||
| RS422/RS485 2ch ターミナル | |||
| デジタル入出力 | デジタル入力 ターミナル PNP, 8点, 10us, IP20 | ||
| デジタル入力 ターミナル PNP, 16点, 3ms, IP20 | |||
| デジタル出力 ターミナル PNP, 8点, 0.5A, IP20 | |||
| デジタル出力 ターミナル PNP, 16点, 0.5A, IP20 | |||
| デジタル入力 ターミナル NPN, 8点, 10us, IP20 | |||
| デジタル入力 ターミナル NPN, 16点, 3ms, IP20 | |||
| デジタル出力 ターミナル NPN, 8点, 0.5A, IP20 | |||
| デジタル出力 ターミナル NPN, 16点, 0.5A, IP20 | |||
| EtherCATボックス | DIO, PNP, 16点, 3ms, IP67 | ||
| DIO, NPN, 16点, 3ms, IP67 | |||
| IO-Linkマスタ, ClassA, IP67 | 4ポート, 8ポート | ||
| IO-Linkマスタ, ClassB, IP67 | 4ポート, 8ポート | ||
| DIO用保護プラグ M8 50個セット | |||
| IO-Link用保護プラグ M12 50個セット | |||
| その他 | EtherCATカプラ+バスエンドキャップセット(組付) | ||
| EtherCATカプラ ターミナル(単体) | |||
| バスエンドキャップ(単体) | |||
| EtherCAT拡張 ターミナル | |||
| Ethernet拡張モジュール(組付) | |||
| AC電源ケーブル(5m) ※いずれか選択必須 |
バラ線タイプ | ||
| Aプラグタイプ(日本) | |||
| Aプラグタイプ(北米) | |||
| SEプラグタイプ(欧州) | |||
| O2プラグタイプ(中国) | |||
| EtherCATケーブル | RJ45-RJ45, 固定用:0.5, 2, 5, 10, 20, 40m | ||
| RJ45-RJ45, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCATボックス用ケーブル | 電源ケーブル | M8-Open, 可動用:2, 10, 40m | |
| M8-M8, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| 7/8"-Open, 耐屈曲用:2, 10, 40m | |||
| 7/8"-7/8", 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| EtherCATケーブル | M8-RJ45, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | ||
| M8-M8, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| IO-Link用センサケーブル | M12-Open, Class A, 可動用:2, 10, 40m | ||
| M12-M12, Class A, 可動用:0.5, 2, 5, 10, 20, 40m | |||
| M12-Open, Class B, 耐屈曲用:2, 10, 40m | |||
| M12-M12, Class B, 耐屈曲用:0.5, 2, 5, 10, 20, 40m | |||
| DIO用センサケーブル | M8-Open, 可動用:2, 10, 40m | ||
| 拡張機能 (USBドングル・ライセンス) |
TwinCAT3 PLC | ||
| TwinCAT3 PLC + HMI Web | |||
| フィールドネットワーク | EtherCATジャンクション | 3ポート, 4ポート, 8ポート | |
| EtherCATブリッジ ターミナル | |||
| PROFINET RTコントローラ ターミナル | |||
| PROFINET RTデバイス ターミナル | |||
| EtherNet/IPマスタ ターミナル | |||
| EtherNet/IPスレーブ ターミナル | |||
| PROFIBUSマスタ ターミナル | |||
| PROFIBUSスレーブ ターミナル | |||
| DeviceNetマスタ ターミナル | |||
| DeviceNetスレーブ ターミナル | |||
| CC-Linkスレーブ ターミナル | |||
| シリアル通信 | RS232C 2ch ターミナル | ||
| RS422/RS485 2ch ターミナル | |||
| デジタル入出力 | デジタル入力 ターミナル PNP, 8点, 10us, IP20 | ||
| デジタル入力 ターミナル PNP, 16点, 3ms, IP20 | |||
| デジタル出力 ターミナル PNP, 8点, 0.5A, IP20 | |||
| デジタル出力 ターミナル PNP, 16点, 0.5A, IP20 | |||
| デジタル入力 ターミナル NPN, 8点, 10us, IP20 | |||
| デジタル入力 ターミナル NPN, 16点, 3ms, IP20 | |||
| デジタル出力 ターミナル NPN, 8点, 0.5A, IP20 | |||
| デジタル出力 ターミナル NPN, 16点, 0.5A, IP20 | |||
| EtherCATボックス | DIO, PNP, 16点, 3ms, IP67 | ||
| DIO, NPN, 16点, 3ms, IP67 | |||
| IO-Linkマスタ, ClassA, IP67 | 4ポート, 8ポート | ||
| IO-Linkマスタ, ClassB, IP67 | 4ポート, 8ポート | ||
| DIO用保護プラグ M8 50個セット | |||
| IO-Link用保護プラグ M12 50個セット | |||
| その他 | EtherCATカプラ+バスエンドキャップセット(組付) | ||
| EtherCATカプラ ターミナル(単体) | |||
| バスエンドキャップ(単体) | |||
| EtherCAT拡張 ターミナル | |||
| Ethernet拡張モジュール(組付) | |||
※EtherCAT®は、Beckhoff Automation GmbH(ドイツ)よりライセンスを受けた特許取得済み技術であり登録商標です。
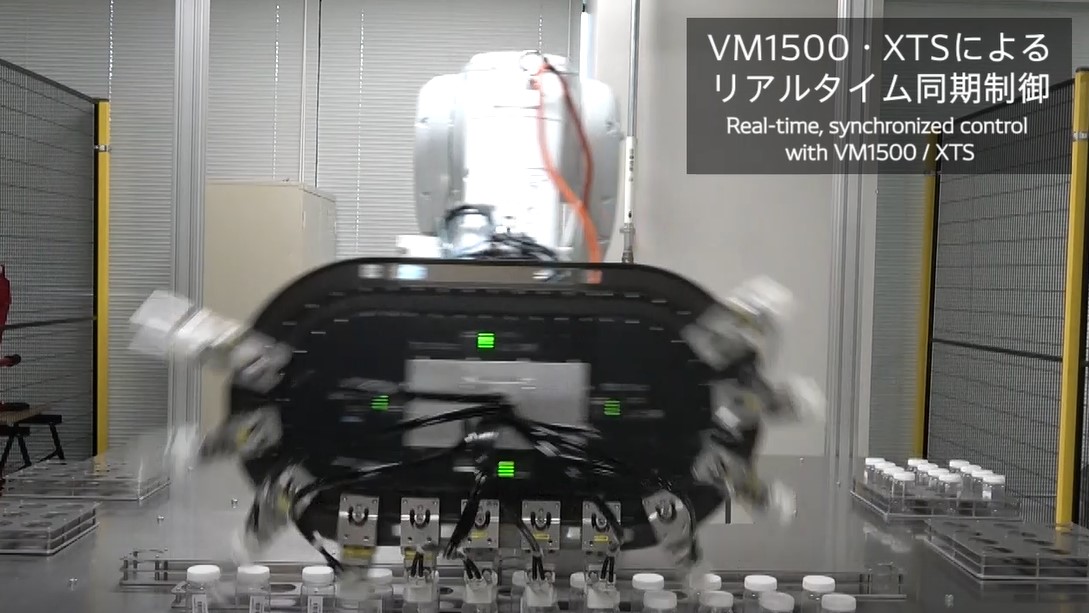
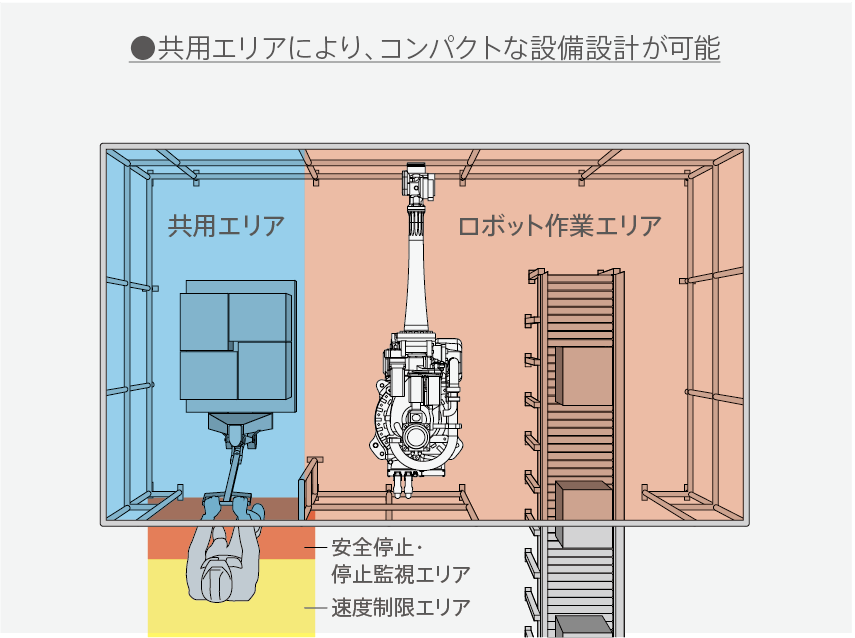
動作エリアの共用が可能になり、安全で生産性の高い設備を実現します。
※2024年リリース

セーフティバーチャルフェンス機能を用いて、ロボットの動作範囲が設定した範囲外に出ていないことを監視します。
■ メリット
・必要最低限の安全柵を設置し、コンパクトな設備設計が可能
・センサ*を用いることで、人とロボットの共用エリアの設置が可能
速度監視機能を用いて、ロボットの動作速度が設定した速度を超えていないことを監視します。
■ メリット
・センサ*が人の接近を検出した際に安全な速
度へ減速
監視静止機能を用いて、ロボットが停止後にモータONでの静止状態であることを監視します。
■ メリット
・停止エリア内への人の侵入と存在をセンサ*が検知すると、ロボットがモータONの状態で停止
・静止状態の保持により、短時間でのプログラム再起動が可能

| 名称 | 内容 |
|---|---|
| 非常停止機能 | ロボットを減速停止し、停止後にモータ動力をOFFする機能です。プログラムはリセット停止します。 |
| 防護停止機能 | ロボット設備の安全防護物などの信号に接続し、信号の入力に応じてロボットを停止させる機能です。 |
| 速度監視機能 | ロボットが指定した動作速度を超えていないことを監視する機能です。 |
| 軸制限機能 | ロボットの各軸が指定した動作範囲を超えていないことを監視する機能です。 |
| 監視静止機能 | ロボットがモータON状態で停止し、移動していないことを監視する機能です。 |
| セーフティーバーチャルフェンス機能 | ロボットが指定した動作範囲外に出ていないことを監視する機能です。 |