아무리 로봇 컨트롤러가 고기능이라도 개발 환경이 바뀌거나 사용하기 어려워지는 것은 곤란하다.
몇십 년이나 작동한 설비를 갑자기 바꾸어 나가는 것이 어려운 제조 설비이므로 더욱 그렇게 생각하는 고객들도 많지 않을까요?
로봇 컨트롤러 ‘RC9’은 지금까지 덴소 로봇이 계속해서 진화시켜 온 개방적이면서 파워풀한 개발 환경을 계승하고 있어 새로운 기능을 기존과 같은 환경에서 개발할 수 있습니다.
다른 기사에서도 접했습니다만, 덴소 로봇의 강점이라 하면 파워풀하면서 동시에 오픈된 개발 환경입니다. 그 개발 환경을 실현하는 포인트는 덴소 로봇 언어 ‘PacScript’와 미들웨어 ‘ORiN’입니다.
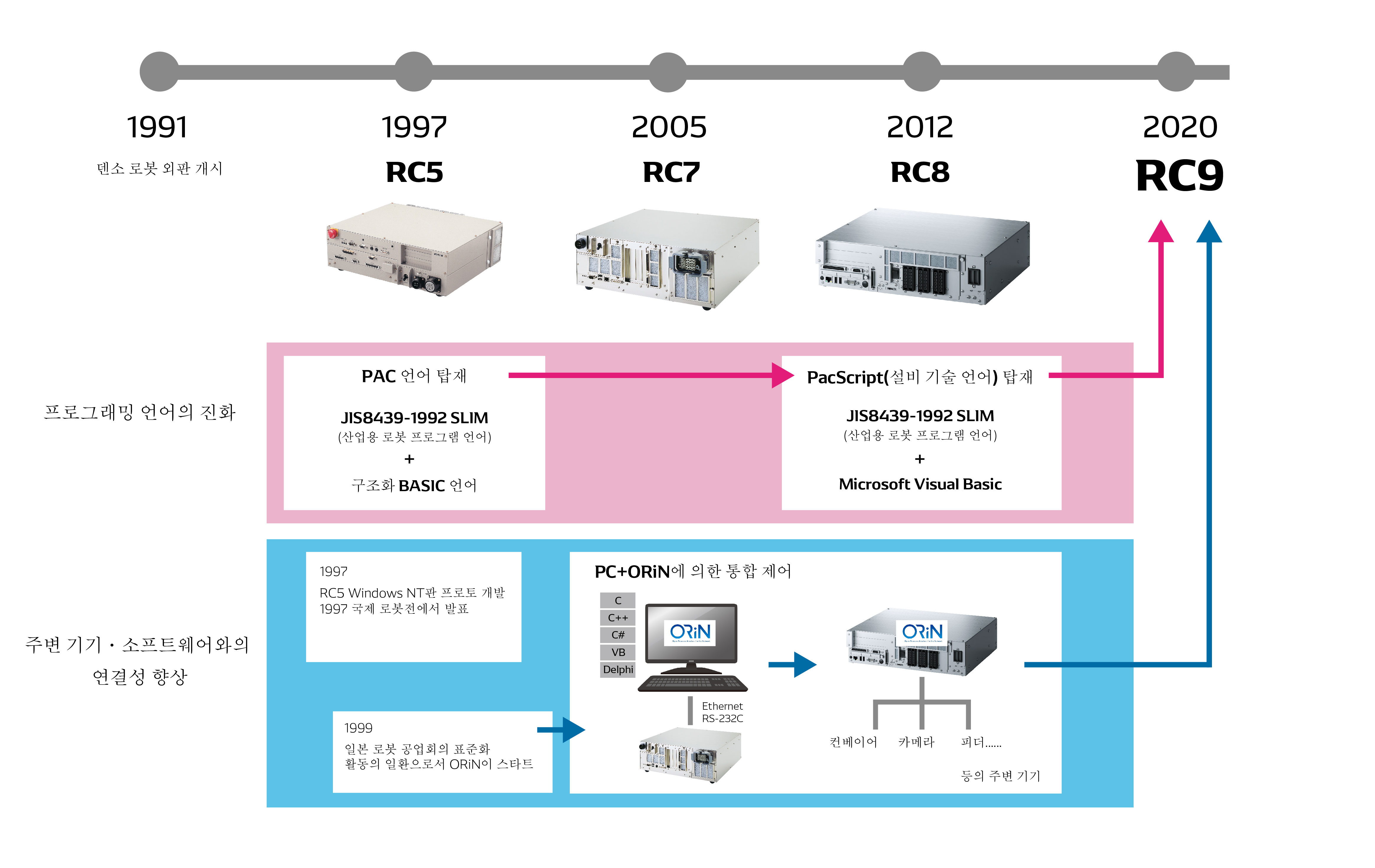
‘PacScript’는 덴소 로봇을 제어하기 위한 프로그래밍 언어로, 산업용 로봇의 프로그래밍 언어 “SLIM 언어”를 바탕으로 Microsoft의 Visual Basic에 높은 친화성을 갖게 했습니다. 따라서 흐름 제어나 산술 함수 등 로봇 동작 이외의 커맨드도 다수 준비되어 있습니다.
또한 ‘ORiN’이란 로봇을 비롯한 각종 FA 기기 및 데이터베이스 등 표준적인 통신 인터페이스를 제공하는 미들웨어입니다. 제조사에 따라 기기의 제어 방법이 다릅니다만, ORiN을 사용함으로써 익숙한 개발 환경에서 제어할 수 있고, 설비의 구축이나 사양 변경 시의 공수 절감에 크게 공헌합니다.
RC8에서는 약 450종류의 커맨드(PacScript)와 약 200종류의 프로바이더(ORiN)를 사용한 파워풀한 개발 환경을 제공해 왔습니다.
여기서 RC8과 RC9의 구성을 비교해 보겠습니다.
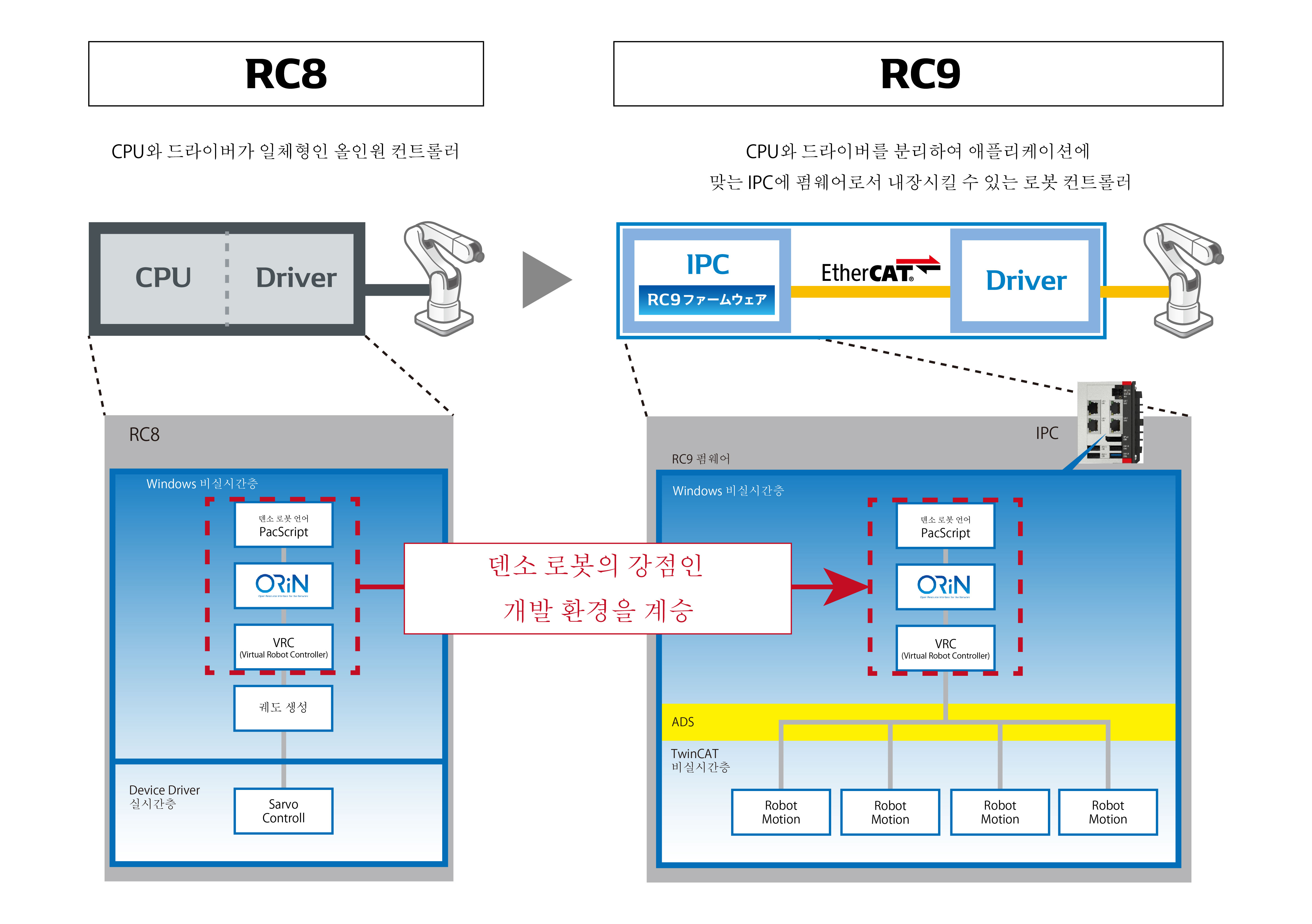
기존부터 있는 고성능 로봇 컨트롤러 ‘RC8’은 CPU와 Driver가 일체화된 올인원 타입 컨트롤러입니다. 내부 구성으로는 Windows(비실시간층)와 Device Driver(실시간층)로 나누어져 있습니다. Windows층에 미들웨어인 ORiN과 VRC가 준비되어 있으며 그 아래에서 궤도 생성이 이루어지고 있습니다.
이에 반해 RC9에서는 CPU와 Driver를 분단하여 EtherCAT으로 연결하는 구성을 채택했습니다. 내부 구성으로는 Windows(비실시간층)와 TwinCAT(실시간층)으로 나누어져 있습니다.
구성은 변화되었지만, 빨간 테두리로 둘러싼 ‘ORiN’, ‘VRC’, ‘PacScript’ 부분은 RC8과 같은 구성으로 되어 있어 덴소 로봇의 강점인 오픈된 개발 환경을 완전히 계승하고 있습니다. 크게 다른 점은 궤도 생성 부분입니다. 궤도 생성을 Windows층이 아니라 TwinCAT의 실시간층에서 실행함으로써 RC8보다 고속의 궤도 생성이 가능해졌습니다.
고기능이 되었을 뿐만 아니라 더욱 프로그래밍과 조작하기 쉬운 로봇 컨트롤러를 목표로 다양한 옵션 제품과 기능을 제공하고 있습니다.

RC9용 티칭 펜던트입니다. 화면을 크게 하고 손에 들기 쉬운 형상으로 바꿔 조작성이 향상되었습니다. 또한 기존의 디스플레이 기능(VGA)뿐인 티칭 펜던트와 달리 티칭 펜던트 자체에 CPU와 OS가 내장되어 있습니다. OS가 내장됨에 따라 WINCAPS Plus용 UI 등의 애플리케이션을 추가하고 표시할 수 있게 되었습니다.
또한 RC9에서는 TC3 HMI를 활용할 수 있습니다. TC3 HMI를 사용함으로써 누구나 직관적으로 알 수 있는 그래피컬한 조작반을 작성할 수 있습니다. 스마트 TP에 표시할 수 있기 때문에 PLC에서 제어하는 로봇 이외의 설비(컨베이어 등 주변 설비)에 관한 조작도 스마트 TP에서 할 수 있으며, 스마트 TP를 설비 전체의 조작반으로서 사용할 수 있습니다.
새롭게 기능을 추가하면서도 개발 환경은 크게 달라지지 않습니다. 예를 들어 로봇 프로그램을 작성하기 위한 소프트웨어 ‘WINCAPS III’는 기존과 같이 사용할 수 있으며, 티칭 펜던트로서도 RC8 호환 UI가 준비되어 있기 때문에 지금까지와 동일한 감각으로 조작할 수 있습니다.
사람 협동 로봇인 ‘COBOTTA’를 직접 조작하여, 그 움직임을 안전 펜스 내에 설치되어 있는 로봇에게 추종시켜 티칭 지원이나 조작을 하는 옵션 기능입니다. COBOTTA와 슬레이브 로봇을 EtherNet 케이블로 연결하는 것만으로도 사용할 수 있는 매우 심플한 구성으로 되어 있습니다. COBOTTA의 그리퍼 개폐용 버튼을 슬레이브 로봇 그리퍼의 ON/OFF에 할당하는 기능이나 슬레이브 로봇이 설정한 영역 밖으로 이동하려고 한 경우에는 COBOTTA가 반력을 반환하여 영역 밖임을 알리는 버추얼 펜스 근방 판정 기능이 준비되어 있습니다. 또한 좌표계를 생각하면서 조작할 필요가 없으므로 보다 직관적인 로봇의 교시 조작이 가능합니다. 의약품 제조 공정 등의 클린 환경, 용접 현장 등 위험한 환경의 밖에서 조작할 수 있어 이물질 혼입이나 작업자의 오염을 방지합니다.
계속해서 ‘RC9’이 가진 특징에 대해 더욱 깊게 알려 드리겠습니다.


덴소 로봇 구입자를 대상으로 덴소 로봇 회원 사이트에서 기술 정보를 중심으로 한 다양한 서비스를 제공하고 있습니다. (영어표기)